小骚货 从“筷子夹火箭”到洗沐调水温,齐离不开这门学问
当地时刻10月13日7时32分许(北京时刻同日20时32分),好意思国得克萨斯州星港辐射基地的晨光中,超重型助推器穿破重重云霭,以2000 km/h的速率“逐步”飘落小骚货,拉出一齐长长的轨迹云。猛禽发动机摇曳着亮堂的尾焰,助推器随之冉冉减慢,在不雅众的一派惊呼声中,近200吨的箭体“轻轻”落在塔架上。
这是好意思国SpaceX公司新一代重型运送火箭“星舰”实施第五次试飞,初次考证了“筷子夹火箭”时期——通过辐射塔的机械臂,在半空中到手拿获回收火箭第一级助推器。这种气象不错松开“星舰”分量,裁汰辐射资本,同期有助于更快地回收、重叠使用助推器,擢升辐射频率。
“筷子夹火箭”被好意思国媒体称为“史无先例”的全新火箭回收气象,对于火箭飞行放胆系统的精度和悬停智商条件极高,略有差池就可能导致火箭在辐射塔上倾倒或爆炸。SpaceX公司独创东谈主埃隆·马斯克此前策动,这次试飞回收到手率仅为50%。事实上,与其说“筷子夹火箭”,不如说是“把火箭停在筷子上”。其时期难度并不在于机械臂的贤人强盛,而在于如何将庞杂的助推器精准悬停在两根“筷子”之间。
而这一历程背后,自动放胆表面功不行没。所谓自动放胆,是指“在莫得东谈主径直参与的情况下,利用外加的诱骗或安设(放胆器),使机器、诱骗或出产历程(被控对象)的某个责任景象或参数(被控量)自动地按照预定的规定运行。”
这听起来似乎有些婉曲,但其实咱们对“放胆”并不目生:“用预备机放胆天地飞船”“基因放胆着遗传”“这个病东谈主的癌症依然不行放胆了”……放胆论(Cybernetics)作为一门措施性的交叉学科,它的目光、寰球不雅早已潜入融入并塑造了咱们的生计——不管是星舰火箭、神经科学、东谈主工智能,如故互联网、玄学、干戈。放胆论的历史是一段跨越了文化、学科和社会鸿沟的历史。
1948年,放胆论前驱诺伯特·维纳(Norbert Wiener)在奠基性文章《放胆论》(Cybernetics)中提到,Cybernetics一词源自希腊语κυβερνήτης,即“掌舵东谈主”。这其中或者有更潜入的意味:舵手对风、潮汐等打扰作出反应,更始“纰谬”,使他的船保持在航路上。如今,科技、东谈主文和社会暗潮滂湃,咱们比以往任何时候齐更需要正确把捏东谈主与自身、机器、乃至社会的干系。
大学工科自动化专科所学习的自动放胆表面(Control Theory),组成了放胆论的中枢基础[放胆表面(Control Theory)可看作放胆论(Cybernetics)的子集,后者的外延更大]。但是,放胆表面诈欺的数学用具令东谈主横眉而视,给东谈主以抽象、精致的印象;超越是入门者,往往被“复频域”“顶点”“滤波”“系统解耦”“开通踏实性”等一大堆名词弄得浑浑噩噩。与此同期,放胆表面本人也还濒临着诸多局限和挑战。
本文将从具体例子着眼,谈谈自动放胆表面的理念和措施,先容它是一门什么样的学问。
对于“开通”的学问
东谈主类电子信息规模科技发展的愿景,其实便是不时鞭策时期跨越,从而最终终了能够自主责任的“智能体”,或者由许多智能体互联协同责任的“超等智能体”。那么一个梦想中的智能体应具备哪些方面的智商呢?可归来如下:
推理:由已知判断,说明一定例则从逻辑上推导出论断。
建模(学习):通过感知到的信息归来规定、赢得知识。
感官:通过传感器感知信息。
顾忌:信息的存储和检索。
开通:能自主开通,且具有均衡性和合营性。
情谊:对于自主智能体来说,情谊决定了行为的动机。
通讯:不同智能体之间或者智能体与东谈主之间能进行相易。
电子信息科技规模内各学科和标的,分别戮力于措置以上不同方面的具体问题。其中自动放胆学科所主要针对的问题便是开通。这里“开通”是广义的,不单是指外皮的位移开通,也包括里面景象的变化。
动态系统和“反馈”
具体而言,自动放胆学科的目的是分析动态系统,了解其开通规定,进而通过休养系统或遐想放胆器,终了所但愿的开通。传统自动放胆学科的基础是动态系统的数学模子。所谓动态系统,指的是现实中那些随时刻不时发生变化,且刻下时刻的景象受夙昔总计时刻的积贮影响,存在“惯性”和“顾忌”的对象。自动放胆学科所波及的动态系统数学模子主要用常微分方程和差分方程来形容。
现实中到处齐是动态系统的实例,从机械臂、单摆到飞机,从河流、沙丘、生物种群到大气系统,从预备机集聚、经济系统到东谈主类社会,再到天地星系……这些系统的景象齐会随时刻而变化。
举例,当电路中含有电感、电容储能元件时,便是一个动态系统:RC串联电路与恒压源接通明,电容元件被充电,其电压冉冉增长,要经过一个暂态历程身手达到踏实值;但要是莫得储能元件,则不属于动态系统,因为电路景象仅由代数方程所默示的即时干系所笃定,在职一时刻的反应只与归拢时刻的激励商酌,而不受夙昔时刻的积贮影响。
一个自主开通的动态系统数学模子如下:
这里x=x(t)是一个向量,称为景象向量,默示系统随时刻变化的开通景象;是x对于时刻的导数,默示景象变化的趋势。这是一个尺度的景象空间方程。不错看出,系统取决于函数f(t,x)的具体表情,包括结构和参数两方面。系统结构指f(t,x)的函数类型,系统参数则指函数抒发式里面一些总计确实切取值。
为达到放胆目的,需要遐想放胆器。放胆器遐想的基本机制,主要包括“负反馈”和“平行”两方面。其中“负反馈”机制号称自动放胆的灵魂,是任何一个灵验的自动放胆系统必需的前提。
不错作念个实验:一个东谈主蒙住眼睛,然后试着走直线。你会发现很难到手。原因在于,东谈主体作为高效的自动放胆系统,执政目的行进的历程中,需要不时地通过反馈信息与及时位置进行比拟,动态修正开通轨迹。而蒙上眼睛,等于丧失了反馈机制。在开通历程中,纰谬是不行幸免的。莫得反馈机制,纰谬会越来越大,无法更始,最终终了不了盼望的放胆目的。
学术界公认,近代自动放胆时期应用于工业启航点于瓦特蒸汽机的调速器。瓦特发现蒸汽机的转速不稳,蒸汽忽大忽小,转速忽快忽慢,于是选拔离心调速器措置问题,如图1所示。纵轴旋转带动小球作念圆周开通,酿成锥面摆。转速越高,离心力越大,小球连杆与纵轴的夹角也越大。再说明这个夹角放胆阀门的开度,使夹角变大时减小蒸汽流,夹角变小时增大蒸汽流。这么就通过引入负反馈机制,使蒸汽机的转速变得踏实。
(瓦特“发明”离心调速器的说法流传较广,但这是误传。在蒸汽机之前,离心调速器已被无数应用在风车上。——编者注)
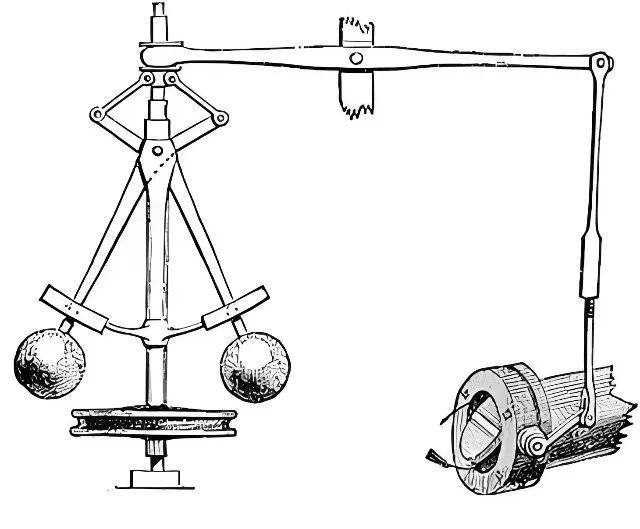
图1 瓦特的离心调速器
洗沐水温怎么调?
那么,只消系统具有负反馈机制,就一定能终了存效放胆吗?生计陶冶就能告诉咱们:不一定。人人齐知谈,展开手心,仅用单手托着木棍保持站立是个时期活,需要不时进行反馈休养。但是光有反馈还不够,反馈的力度大小也很诡秘,力度太小或者太大齐容易倾倒。
用旧式沸水器洗沐的时候,水温靠手动调治一个机械阀门来放胆。如何调治水温亦然一个时期活。水温时时忽高忽低,阀门一会开大了一会关小了,半天也调分歧适,以至未必候“越描越黑”。这个场景其实是一个调治器系统,属于典型的自动放胆系统,包含了受控对象、测量机构、放胆器和实施机构,具有负反馈机制。这里受控对象是冷沸水管路系统,测量机构是东谈主的皮肤,放胆器是东谈主的大脑,实施机构是东谈主的手和调治阀。
其实是香蕉在线视频观看底下通过简便仿真来具体演示想象情境(不一定是洗沐)下,一个由调治阀放胆的温控系统的调治历程。所使用的系统仿真用具是最常用的Simulink。
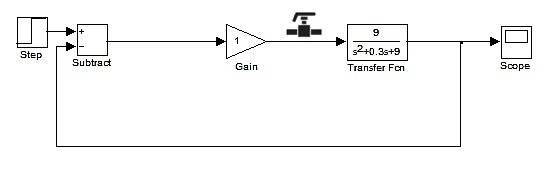
图2 一个自动放胆系统仿真结构
图2中的“Transfer Fcn”模块默示想象的受控对象模子,该模子是传递函数表情,即模块里的多项式分式,读者不错视为黑箱,毋庸沟通细节。它的输入信号是阀门开度,输出信号是施行温度。“Step”默示盼望温度,咱们设定为40。盼望温度减去不雅测到的施行温度,便是反馈纰谬信号,这是放胆的依据,在图2中对应“Subtract”模块的输出。
显著,最直不雅当然的放胆战略,是说明反馈纰谬调治阀门开度。当该纰谬取适值,诠释温度偏低,水阀应该向沸水标的调治,纰谬越大,阀门也开得越大。反之,要是纰谬是负值,水阀向冷水标的调治。总之,阀门的开启角度跟纰谬成正比。这其实便是所谓的“比例放胆”,“Gain”默示对信号的比例放大倍数,汉文一般翻译为“增益”。
当比例增益为1时,“Scope”模块所夸耀的输出效力如图3所示:
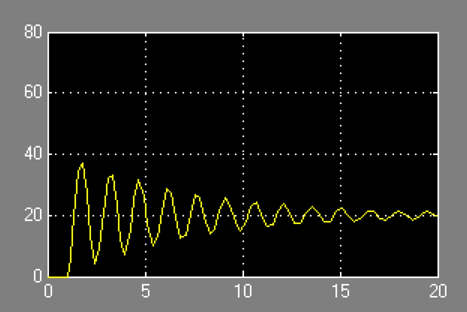
图3 比例增益为1时的输出效力
可见经过反复调治,温度会趋于稳态,系统的动态特色似乎也不算太差。但是出现了个出东谈主预感的歪邪抖擞:效力跟盼望之间存在很彰着的纰谬,无法摒除。这用放胆表面的术语叫“静差”。
将比例增益增多到10,特地于用更大的阀门开度去顶住温度互异。效力如图4:
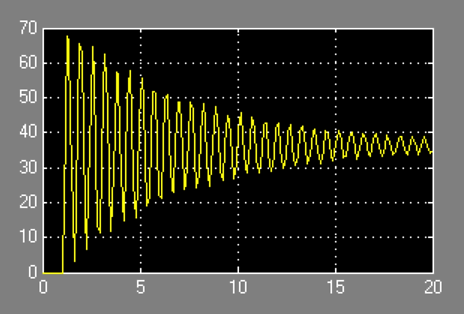
图4 比例增益为10时的输出效力
这种情况下,温度依然会趋稳,但是飘荡幅度与频率齐加大,动态特色变差了。静差却变小不少,依然不那么彰着了。
以上是梦想的比例放胆。但是,现实老是跟梦想存在差距。对于洗沐水温放胆系统来说,调治系统的施行放胆器是东谈主,是东谈主齐会有反适时刻。假设是0.1秒,依然算反应特地快了。这特地于在系统反馈回路中多了一个0.1秒的延时法子,如图5。
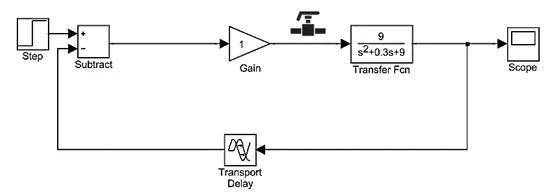
图5 反馈回路有延时的放胆系统
运行效力如图6所示:
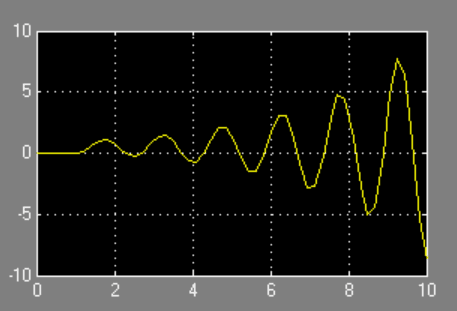
图6 反馈回路有延时的输出效力
只是增多了一个看似微不及谈的延时法子,就使系统变得不再踏实。可见,仅依赖反馈机制的放胆并不一定可靠。
比例、导数、积分和“PID放胆”
上头先容了一个相配简便的反馈调治系统。朴素的反馈放胆想想开首于直不雅的生计学问。但是,面对施行系统放胆问题,这是远远不够的,还会遭受各种各样预感不到的问题。生计在今天的咱们不错想见,瓦特时期的工程师在实践中必定时时面对日出不穷的怪问题、怪抖擞,令他们抓狂不已,一筹莫展。事实上,瓦特的离心调速器照实无法在职何工况齐保持踏实。有些情况下,调速器可能反倒会加重系统飘荡,导致蒸汽机转速忽快忽慢。
咱们依然领有了一整套表面体系,能对许多“怪问题”给出谜底,灵验地匡助咱们分析动态系统的基本开通规定,解释开通抖擞,和遐想放胆器措置各种施行问题。东谈主手托木棍设法使其保持站立是一件很艰辛的事。因为这是一个倒立摆,属于骨子上不踏实的系统,一晃就倒。但是诈欺自动放胆的知识措施,用机电系统措置这类均衡问题就举手之劳,况兼能确保完全可靠。对学自动化专科的本科生来说,自行遐想制作两轮均衡车是一件很简便的事情,并不需要何等精致的时期。
放胆表面告诉咱们,要是在前边扣问的调治系统中,决定阀门开度时不仅沟通纰谬的大小,还沟通纰谬变化的快慢,这就特地于引入了阻尼。阻尼不错改善动态特色。把阻尼调小,动态反应就变得更“贼”一些,反应速率更快;而把阻尼调大,就变得更“笨”,反应速率变慢。这在放胆表面中叫“导数放胆”。
要是不仅沟通纰谬的瞬时变化,况兼让纰谬的历史积贮也来影响阀门的开度,就不错把静差摒除。这么可在纰谬为0时仍然能够使调治阀保持所盼望的角度。这在放胆表面中叫“积分放胆”。这么一来,年复一年的阀门开度齐通过详尽沟通纰谬大小、纰谬变化快慢和积贮纰谬来决定。放胆器同期包含比例、导数和积分法子,便是闻名的“PID放胆”(Proportional-Integral-Derivative Control)。合理诈欺PID放胆器,就不错措置不少施行放胆问题。
通盘放胆表面的知识体系很丰富,PID放胆只是基础良友。当今放胆表面的骨干被梗概远隔为两部天职容,分别是“经典放胆表面”和“当代放胆表面”。
经典放胆的表面体系发展老到于20世纪中前期,当代放胆的表面体系则发展老到于20世纪中后期。决定二者分野的关节,便是电子预备机的发明所激发的预备、分析、仿真乃至放胆措施的变革。在上世纪50年代之前,总计的科学预备齐由东谈主利用草稿纸、预备尺和数学用表等用具手工完成。其时候“Computer”可不是机器,而是东谈主,是一种作事。要是翻译成汉语,请务必译成“预备员”或者“预备师”。因此,通盘经典放胆表面,齐奋勉能完全适用于纯手工的预备、分析和遐想。
当代放胆表面则莫得这个禁忌,是以能够更目田、更紧密,合适措置更复杂的问题。自20世纪70年代以后,又出现了“先进放胆”的一些理念和措施,包括处理系统不笃定性和扰动的影响的鲁棒放胆、能随系统参数变化自动更正放胆器的自顺应放胆、以及络续东谈主工神经元和腌臜逻辑等东谈主工智能时期的智能放胆等。这些放胆措施充实了放胆表面的内涵,拓展了应用范围。
“平行”想想和两个例子
反馈是自动放胆的中枢想想之一。而自动放胆的第二个中枢想想是平行。超越是当需要遐想某种安设措置特定放胆问题时,基于“平行”理念寻找谜底,是一个基本想路。龙伯格不雅测器和史姑娘预估器齐是这方面的典型例子。
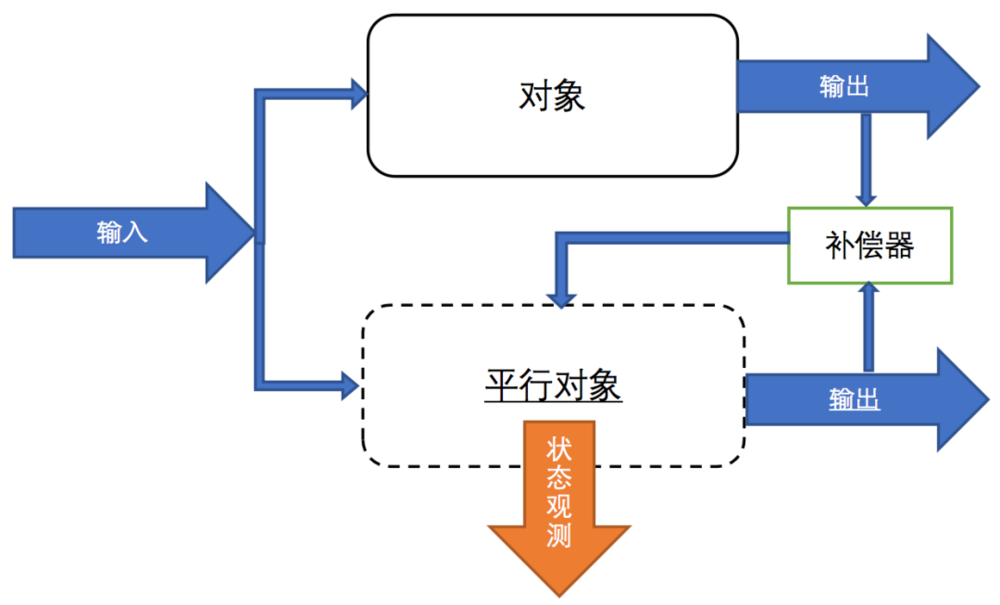
图7 “平行”系统
未必候一个动态对象的里面景象无法量测,能量测到的独一输出信号。一般来说,输出信号的维数低于里面景象,只可体现里面景象的部分信息。剩余部分则被粉饰了,无法获知。如何透过表象获知骨子,估测出粉饰的里面景象?
龙伯格等东谈主发明了一种玄妙的措施来措置这个问题,想路便是基于平行理念。不雅测对象是客不雅存在的,无法深入其里面去量测。但是,咱们不错构建一个与不雅测对象雷同的造谣系统,而这个系统是东谈主造的,不错苟且量测。只消两个系统“一模雷同”,这时候对东谈主造系统里面景象的量测值就不错拿过来看成不雅测对象的景象意象。
这个造谣副本系统,其作用只为生成不雅测对象里面景象的意象值,是以叫“不雅测器”。着实系统与其造谣副本“一模雷同”是作念不到的。因此实用的龙伯格不雅测器还需要引入反馈,说明两个平行系统输出量之间的纰谬修正不雅测效力。
有些受控对象是存在固未必滞的,举例前边扣问的温度调治系统。利用史姑娘预估器不错玄妙地把时滞给“消掉”,想路亦然基于平行理念。读者或者依然猜到梗概终了旨趣了。咱们不错构建一个与不雅测对象雷同的造谣系统,而这个系统是东谈主造的,不错作念到没未必滞。只消两个系统“一模雷同”,这时候东谈主造系统的输出值就不错看成受控对象输出的提前预估。
用东谈主造系统代替受控对象进行反馈放胆,就特地于把时滞给摒除了。这个造谣副本系统,其作用只为预估时滞受控对象的输出信息,是以叫“预估器”。
自动放胆中许多其他用于措置特定问题的安设也齐蕴含着平行理念,如内模放胆器、鲁棒赔偿器、模子策动放胆等。
自动放胆依然酿成了老到丰富的知识体系,不错灵验措置许多工程问题。放胆表面在上个世纪赶紧发展,履历了几个要紧阶段,包括经典放胆、当代放胆以及“先进放胆表面”。诚然这门学科似乎仍然年青,但履历了这些阶段之后,局限性已启动线路。
传统自动放胆措施超越擅长措置开通体的机电放胆以及相对比拟简便的历程放胆等问题,如车辆放胆、船舶放胆、飞行器放胆、机器东谈主开通放胆、制导、火控系统终了等。对这类系统,东谈主们大齐不错通过牛顿力学分析缔造阶次较低的数学模子,并能基于微分方程数值解终了精准的仿真。传统放胆表面体系的措施论范式依赖于数学的线性/非线性能源学,对系统性质的判断和开通趋势的策动均强调严格的数学诠释注解。但是,现实中有更多的复杂动态系统无法或很难缔造明确的简便微分方程模子。
尽管如斯,社会和经济发展的需求依然越来越弥留,条件东谈主们尽快从科学、工程的角度为这些复杂系统的分析、策动、放胆乃至方案和管制问题提供措置想路。钱学森先生早已指出:放胆的将来在于通盘措施论体系的质变。将来措施论的变革应该包含两个趋向。一方面小骚货,放胆表面自身的发展更趋向物理化、实验化、智能化,从而对各种复杂工程对象有更好的适用性。另一方面,放胆表面需要会通多学科知识,深化学科交叉,才有可能处理更广域的复杂工程问题。
-
热点资讯
-
相关资讯